Contents¶
1) Introduction
2) Model Based RL
3) Dyna: Integrating Planning, Acting, and Learning
4) Prioritizing Sweeps
5) Planning as a part of action Selection(MCTS)
Introduction ¶
- Model-Free RL
- No model
- Learn value function (and/or policy) from experience
- Model-Based RL
- Learn a model from experience
- Plan value function (and/or policy) from mode
In this Chapter we will learn how to learn a model directly from the environment and use planning to construct a value function/policy.
What is a model?¶
A model of the environment we mean anything that an agent can use to predict how the environment will respond to its actions.
Some models produce a description of all possibilities and their probabilities; these we call distribution models.
Other models produce just one of the possibilities, sampled according to the probabilities; these we call sample models.
What is planning?¶
We use the term Planning to refer to any computational process that takes a model as input and produces or improves a policy for interacting with the modeled environment.
state-space planning- Planning is viewed primarily as a search through the state space for an optimal policy or path to a goal.
plan-space planning- Planning is instead viewed as a search through the space of plans.Plan-space planning includes evolutionary methods and “partial-order planning".
In state space planning, two fundamental ideas:
1) All state-space planning methods involve computing value functions as a key intermediate step toward improving the policy, and
2) They compute their value functions by backup operations applied to simulated experience.

For eg: Dynamic Programming.
Difference between Planning and Learning:¶
The difference is that whereas planning uses simulated experience generated by a model, learning methods use real experience generated by the environment.
Model Based RL ¶

- Advantages:
- Can efficiently learn model by supervised learning methods
- Can reason about model uncertainty
- Disadvantages:
- First learn a model, then construct a value function
- Two sources of approximation error
The model¶
- We will assume state space $S$ and action space $A$ are known.
- A model $M$ is a representation of an MDP $\{S, A,P, R\}$ parametrized by $\eta$.
- So a model $M = \{P_\eta,R_\eta\}$, where
- $P_\eta \approx P$ represents state transitions
- and $R_\eta \approx R$ represents the rewards.
- $$ S_{t+1} ~ P_\eta(S_{t+1} | S_t, A_t)$$ $$ R_{t+1} = R_\eta(R_{t+1} | S_t, A_t)$$
- Typically assume conditional independence between state transitions and rewards:
$$ P [S_{t+1}, R_{t+1} | St , At ] = P [S_{t+1} | St, At] P [R_{t+1} | St , At] $$
Model Learning¶
Goal: estimate model $M_\eta$ from experience $\{S_1, A_1, R_2, ..., S_T \}$
- This is a supervised learning problem
- $S_1, A_1 \rhd R_2, S_2$
- $S_2, A_2 \rhd R_3, S_3$
- .
- .
- .
- $S_{T−1}, A_{T−1} \rhd R_T , S_T$
- $S_1, A_1 \rhd R_2, S_2$
- Learning $s, a \rhd r$ is a regression problem,
- Learning $s, a \rhd s$ is a density estimation problem.
Pick loss function, e.g. mean-squared error, KL divergence, ...
Find parameters $\eta$ that minimise empirical loss
Examples of Models¶
Table Lookup Model
Linear Expectation Model
Linear Gaussian Model
Gaussian Process Model
Deep Belief Network Mode
Table Lookup Model¶
- Model is an explicit MDP, $\hat{P}, \hat{R}$
Count visits $N(s, a)$ to each state action pair
#### $$ \hat{P}^a_{s,s'} = \frac{1}{N(s, a)} \sum^{T}_{t=1}{\textbf{1}(S_t, A_t, St+1 = s, a,s')}$$
#### $$ \hat{R}^a_{s} = \frac{1}{N(s, a)} \sum^T_{t=1}{\textbf{1}(S_t , A_t = s, a)R_t} $$
- Alternatively,
- At each time-step $t$, record experience tuple
$\{S_t,A_t, R_{t+1}, S_{t+1}\}$ - To sample model, randomly pick tuple matching $\{s,a,.,.\}$
- At each time-step $t$, record experience tuple
Planning with a Model¶
- Given a model $M_\eta = \{P_\eta, R_\eta\}$
- Solve the MDP $\{S, A,P_\eta, R_\eta \}$
- Using favourite planning algorithm
- Value iteration
- Policy iteration
- ...
Sample-Based Planning¶
- A simple but powerful approach to planning
- Use the model only to generate samples
- Sample experience from model $$ S_{t+1} ∼ P_\eta(S_{t+1} | S_t , A_t)$$ $$ R_{t+1} = R_\eta(R_{t+1} | S_t , A_t)$$
- Apply model-free RL to samples, e.g.:
- Monte-Carlo control
- Sarsa
- Q-learning
- Sample-based planning methods are often more efficient
Disadvantages:¶
- We mostly have an imperfect model $\{P_\eta, R_\eta\} \approx \{P, R\}$
- Performance of model-based RL is limited to optimal policy for approximate MDP$\{S, A,P_\eta, R_\eta \}$
- i.e. Model-based RL is only as good as the estimated model When the model is inaccurate, planning process will compute a suboptimal policy.
- Solution 1: when model is wrong, use model-free RL
- Solution 2: reason explicitly about model uncertainty
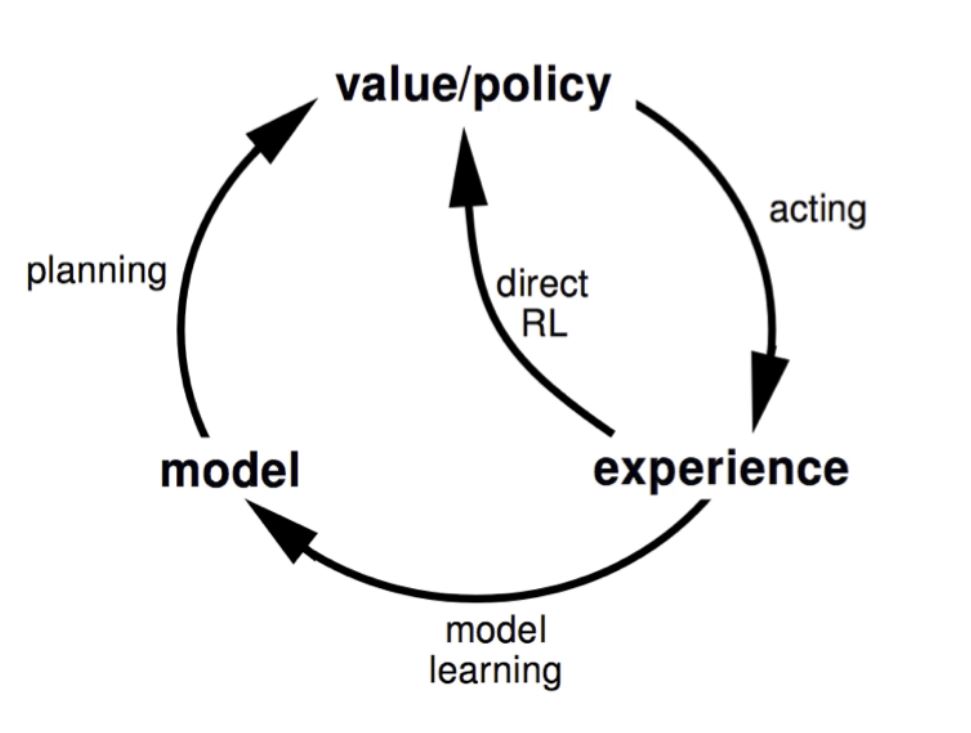
Dyna: Integrating Planning, Acting, and Learning ¶
Real and Simulated Experience¶
- We consider two sources of experience
- Real experience Sampled from environment (true MDP) $$ S' ~ P^a_{s,s'}$$ $$ R = R^a_s $$
- Simulated experience Sampled from model (approximate MDP) $$ S' ~ P_\eta(S'|S,A) $$ $$ R' = R_\eta(S'|S,A) $$
- Real Experience has two roles:
- Model Learning.
- Direct Reinforcement learning.
Dyna¶
Tabular Dyna-Q Algorithm¶

Results¶

Results¶

When the model is wrong¶
- In previous section, the model started out empty, and was then filled only with exactly correct information.
- In general, Models may be incorrect because
- The environment is stochastic.
- Only a limited number of samples have been observed.
- The model was learned using function approximation that has generalized imperfectly.
- The environment has changed and its new behavior has not yet been observed.
Examples¶

Examples¶

Dyna +¶
- Agent keeps track for each state–action pair how many time steps elapsed since last tried in a real interaction.
- Greater the time elapsed, the greater (we might presume) the chance that the dynamics of this pair has changed and that the model of it is incorrect.
- To encourage behavior that tests long-untried actions,
- a special “bonus reward” is given on simulated experiences involving these actions.
- if the modeled reward $r$, and $\{S,A\}$ has not been tried in $\tau$ time steps,
$r = r + κ\sqrt{\tau}$ , for some small κ.
Prioritized Sweeps¶
Introuction¶
- If simulated transitions are generated uniformly, then many wasteful backups will be made before stumbling onto one of these useful ones.
- In the much larger problems that are our real objective, the number of states is so large that an unfocused search would be extremely inefficient.
- In general, we want to work back from any state whose value has changed.
'Backward focusing' of planning computations¶
- the agent discovers a change in the environment and changes its estimated value of one state.
- The only useful one-step backups are those of actions that lead directly into the one state whose value has been changed.
- Hence we simulate those steps first.
- The frontier of useful backups propagates backward, it often grows rapidly.
- Hence we prioritize the backups according to a measure of their urgency.
- This is the idea behind prioritized sweeping.
Prioritized sweeping for a deterministic environment Algorithm¶

Results¶

Rod Maneuvering Task¶
- 14,400 possible states(36 angles, 20x20 Space)
- Actions: AlongRod,PerpRod,RotateL,RotateR
- Ackwardly placed immovable obstacles.

Planning as Part of Action Selection ¶
Introduction¶
- The planning seen till now:
- The gradual improvement of a policy/value function that is good in all states generally,
- Not focused on any particular state.
- Eg: Dyna, DP.
- A different outlook:
- planning is begun and completed after encountering each new state $S_t$.
- output is not really a policy,rather a single decision, the action $A_t$.
- next step the planning begins anew with $S_{t+1}$ to produce $A_{t+1}$, and so on.
Some general Features of PPAS¶
- the values and policy are specific to the current state and its choices,
- They are typically discarded after being used to select the current action.
- useful in applications in which fast responses are not required.
Simulation-Based Search¶
- Forward search paradigm using sample-based planning
- Simulate episodes of experience from current time step with the model
- Apply model-free RL to simulated episodes

Simulate episodes of experience from 'now' with the model ### $$ \{ s_t^k,A^k_t, R^k_{t+1},... S^k_T \} ^K_{k=1} \sim M_\nu $$
Apply model-free RL to simulated episodes
- Monte-Carlo control → Monte-Carlo search
- Sarsa → TD search
Simple Monte Carlo Search¶

- With a perfect model and an imperfect action-value function, then deeper search will usually yield better policies.
Monte Carlo Tree Search ¶
- One of the recent and successful developments in planning.
- Broken into two steps:
- Evaluation
- Simulation
Evaluation¶

Simulation¶

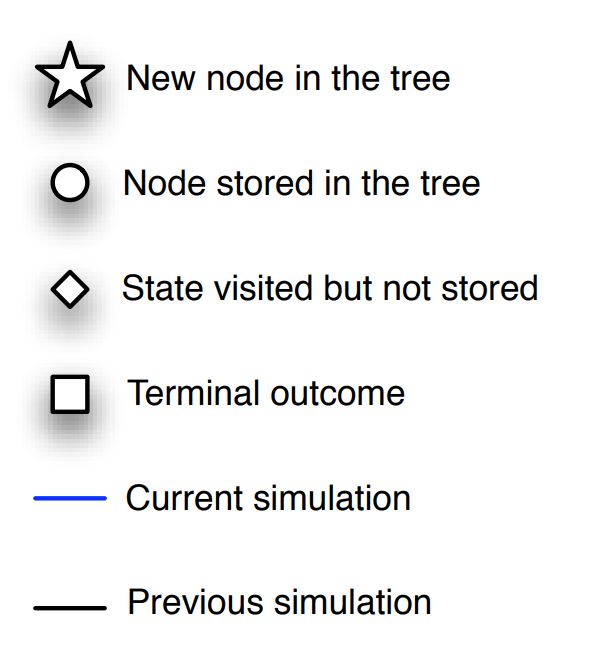
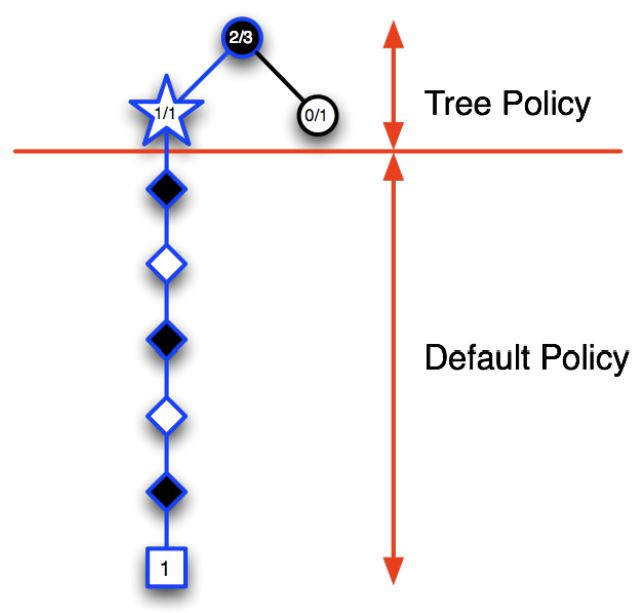
breakdown of MCTS¶

Steps:¶
1) Selection: A node in the current tree is selected by some informed means as the most promising node from which to explore further.
2) Expansion: The tree is expanded from the selected node by adding one or more nodes as its children.
- Each new child node is now a leaf node of the partial game tree, meaning
- None of its possible moves have been visited yet in constructing the tree.
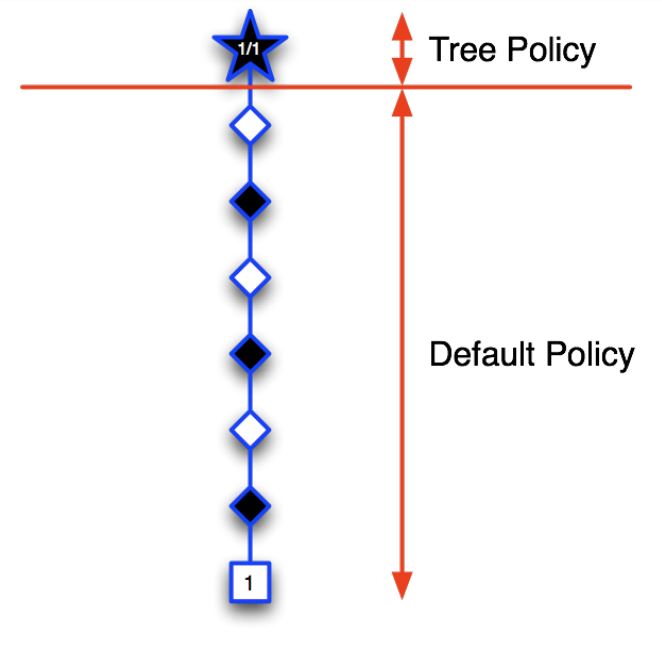
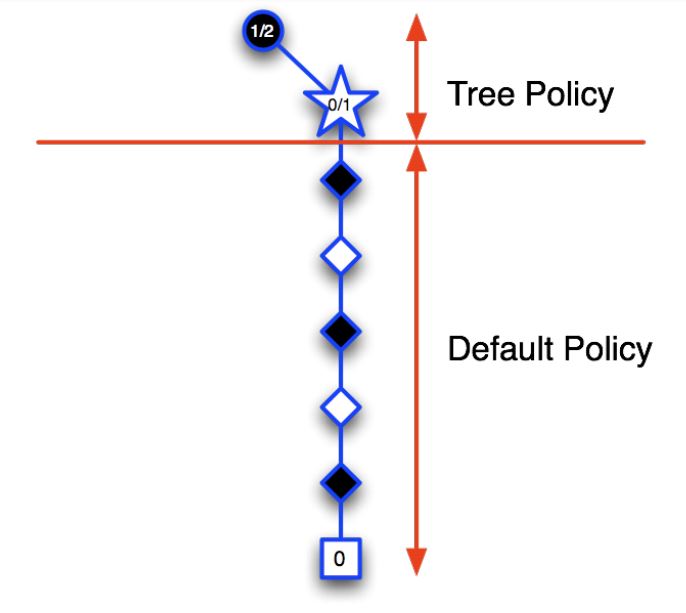
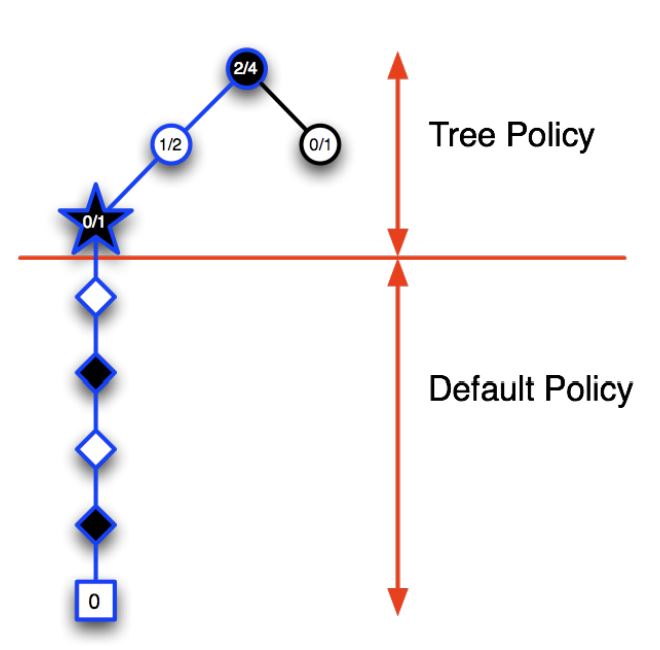
breakdown of MCTS¶
3) Simulation: From one of these leaf nodes, or another node having an unvisited move,a move is selected as the start of a simulation, or rollout, of a complete game.
- Moves are selected by a rollout policy.
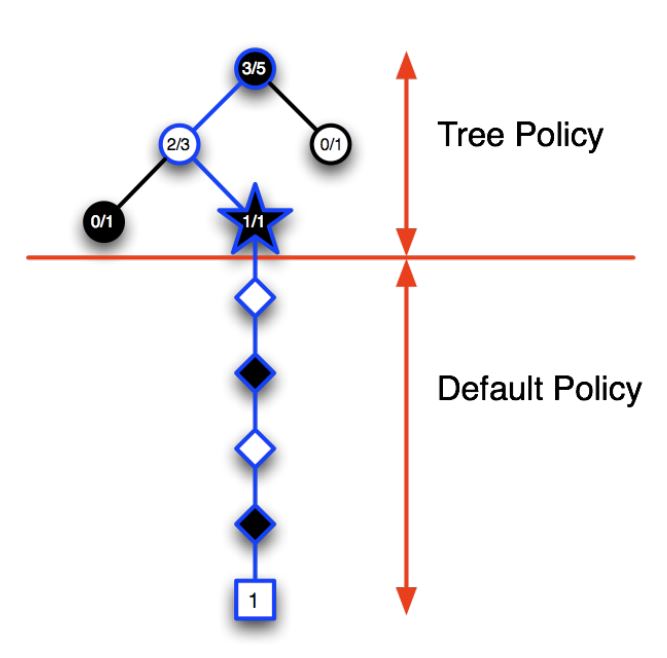
4) Backpropagation: The result of the simulated game is backed up to update statistics attached to the links in the partial game tree traversed.
Example¶
Advantages of MCTS¶
- Highly selective best-first search
- Evaluates states dynamically (unlike e.g. DP)
- Uses sampling to break curse of dimensionality
- Works for “black-box” models (only requires samples)
- Computationally efficient, anytime, parallelisable